System of Particles and Rotational Motion — Important Questions
34 questions
With answersCBSE format
SUMMARY: This chapter explores the dynamics of systems of particles and the principles of rotational motion, including the concepts of center of mass and torque. KEY TOPICS: center of mass, torque, angular momentum, moment of inertia, rotational kinetic energy, equilibrium of rigid bodies, theorems of perpendicular and parallel axes, rolling motion, conservation of angular momentum, rigid body dynamics
The moment of inertia of a uniform rod of mass M and length L about an axis through its centre and perpendicular to its length is:
AML²/12
BML²/3
CML²/6
DML²
Check answerHide answer
Correct answer: Option 1 — ML²/12
Q21 Mark
Torque is the rotational analogue of:
AVelocity
BForce
CMass
DEnergy
Check answerHide answer
Correct answer: Option 2 — Force
Q31 Mark
The angular momentum of a particle about a point is:
AL = m × v
BL = r × p
CL = m × r
DL = F × r
Check answerHide answer
Correct answer: Option 2 — L = r × p
Q41 Mark
For a body in pure rolling without slipping the linear velocity v of the centre of mass and angular velocity ω are related by:
Av = ω
Bv = rω
Cv = r/ω
Dv = ω/r
Check answerHide answer
Correct answer: Option 2 — v = rω
Q51 Mark
The centre of mass of a uniform circular ring lies:
AOn the ring
BAt its centre
COutside the ring
DCannot be determined
Check answerHide answer
Correct answer: Option 2 — At its centre
Short Answer Questions5 questions
Q63 Marks
Define centre of mass and write the formula for a system of particles.
View sample solutionHide solution
Centre of mass (COM) is the unique point where the entire mass of the system can be considered to be concentrated for translational motion. For a system of particles: x_COM = Σ(m_i x_i)/Σm_i; similarly for y and z. For continuous distributions: x_COM = (1/M) ∫ x dm. The COM of an isolated system moves with constant velocity (Newton's first law for the system).
Q73 Marks
Define moment of inertia and write its formula for a discrete distribution.
View sample solutionHide solution
Moment of inertia (I) is the rotational equivalent of mass — measures the resistance to angular acceleration about an axis. For point particles: I = Σ m_i r_i² where r_i is the perpendicular distance of mass m_i from the axis. SI unit: kg·m². I depends on the mass distribution AND on the chosen axis.
Q83 Marks
State the parallel axes theorem.
View sample solutionHide solution
Parallel axis theorem: I about an axis parallel to one through the centre of mass equals the moment of inertia about the COM axis plus M·d² where M is total mass and d is the distance between the two parallel axes. I = I_COM + Md². Useful for finding I about non-COM axes from a known COM moment.
Q93 Marks
A wheel of moment of inertia 2 kg·m² is rotating at 10 rad/s. Find its rotational kinetic energy.
View sample solutionHide solution
KE_rotational = (1/2) I ω² = (1/2)(2)(10²) = 100 J. The formula is the rotational analogue of (1/2)mv² with I replacing m and ω replacing v.
Q103 Marks
State and explain the principle of conservation of angular momentum.
View sample solutionHide solution
In the absence of external torque the total angular momentum of a system is conserved: L = Iω = constant. So if I changes (e.g. by a skater pulling arms in) ω must change inversely. This is why skaters spin faster when arms come in. Mathematically follows from τ = dL/dt — with τ_ext = 0 dL/dt = 0.
Long Answer Questions6 questions
Q116 Marks
A solid sphere of radius R rolls down an inclined plane of height h without slipping. Find its velocity at the bottom.
View sample solutionHide solution
Energy conservation: mgh = (1/2)mv² + (1/2)Iω². For solid sphere I = (2/5)mR² and v = Rω so ω = v/R. (1/2)Iω² = (1/2)(2/5)mR²(v²/R²) = (1/5)mv². Total KE = (1/2)mv² + (1/5)mv² = (7/10)mv². So mgh = (7/10)mv² ⇒ v = √(10gh/7). Note v < √(2gh) — rolling is slower than sliding because some KE is in rotation.
Q126 Marks
State and prove the perpendicular axes theorem for a planar body.
View sample solutionHide solution
Perpendicular axes theorem: for a planar body in the xy-plane the moment of inertia about an axis perpendicular to the plane (z-axis) at any point equals the sum of the moments of inertia about two perpendicular axes (x and y) lying in the plane and intersecting at that point: I_z = I_x + I_y. Proof: for an element at (x, y) the distance from x-axis is y from y-axis is x and from z-axis is √(x²+y²). So I_x = ∫y² dm I_y = ∫x² dm and I_z = ∫(x² + y²) dm = I_x + I_y.
Q136 Marks
A force F = 5 N is applied perpendicularly to the end of a 0.4 m long rod. Calculate the torque about the other end. Then if the rod has moment of inertia 0.2 kg·m² about that end, find its angular acceleration.
View sample solutionHide solution
Torque τ = F × r = 5 × 0.4 = 2 N·m. Angular acceleration α = τ/I = 2/0.2 = 10 rad/s² (rotational analogue of a = F/m).
Q146 Marks
Discuss the kinetic energy of a rigid body in rolling motion.
View sample solutionHide solution
Total KE of a rolling body = translational KE + rotational KE = (1/2) M v_COM² + (1/2) I ω². For pure rolling v_COM = R ω so ω = v/R. Substituting: KE_total = (1/2) M v² + (1/2)(I/R²) v² = (1/2) M v² (1 + I/(MR²)). The factor (1 + I/(MR²)) depends on shape: ring → 2; disc → 3/2; sphere → 7/5. So a sphere rolls fastest down a slope a ring slowest (more KE goes into rotation for higher I/MR² shapes).
Q156 Marks
A skater with arms outstretched has moment of inertia 4 kg·m² and rotates at 2 rad/s. When she pulls her arms in her moment of inertia becomes 1 kg·m². Find her new angular velocity and the change in rotational kinetic energy.
View sample solutionHide solution
By conservation of angular momentum: I₁ ω₁ = I₂ ω₂ ⇒ 4(2) = 1 ω₂ ⇒ ω₂ = 8 rad/s. Initial KE = (1/2)(4)(2²) = 8 J. Final KE = (1/2)(1)(8²) = 32 J. Change = 32 − 8 = 24 J (increase). The extra energy comes from the work the skater's muscles did pulling her arms in against the centripetal pseudo-force.
Q166 Marks
Compare centre of mass and centre of gravity with the help of a table.
Assertion–Reason Questions5 questions
Q171 Mark
Assertion (A): The centre of mass of a uniform body lies at its geometric centre.
Reason (R): For a body with uniform density the mass is symmetrically distributed about the geometric centre.
Show explanationHide explanation
Correct answer: Option 1 —
Both A and R are true, and R is the correct explanation of A.
Q181 Mark
Assertion (A): Torque is the rotational analogue of force.
Reason (R): Just as force changes linear momentum torque changes angular momentum: τ = dL/dt.
Show explanationHide explanation
Correct answer: Option 1 —
Both A and R are true, and R is the correct explanation of A.
Q191 Mark
Assertion (A): A solid sphere has lower moment of inertia than a hollow sphere of the same mass and radius about the same axis.
Reason (R): The mass of a solid sphere is distributed closer to the centre than for a hollow sphere — so the average r² is smaller.
Show explanationHide explanation
Correct answer: Option 1 —
Both A and R are true, and R is the correct explanation of A.
Q201 Mark
Assertion (A): A figure skater spins faster when she pulls her arms in.
Reason (R): Conservation of angular momentum: as I decreases ω must increase to keep L = Iω constant.
Show explanationHide explanation
Correct answer: Option 1 —
Both A and R are true, and R is the correct explanation of A.
Q211 Mark
Assertion (A): A solid cylinder rolls down a slope faster than a hollow cylinder.
Reason (R): The solid cylinder has lower I/MR² so a smaller fraction of total KE goes into rotation — more KE remains for translation.
Show explanationHide explanation
Correct answer: Option 1 —
Both A and R are true, and R is the correct explanation of A.
Statement-Based Questions5 questions
Q221 Mark
Statement 1: The COM of a system moves as if all external forces acted at it.
Statement 2: The COM of an isolated system moves with constant velocity.
Show answerHide answer
Correct answer: Option 1 —
Both statements are true.
Q231 Mark
Statement 1: Torque is the rotational analogue of force.
Statement 2: τ = r × F where r is the position vector and F the applied force.
Show answerHide answer
Correct answer: Option 1 —
Both statements are true.
Q241 Mark
Statement 1: Moment of inertia depends on the mass distribution and the axis.
Statement 2: A larger moment of inertia gives larger angular momentum at the same angular velocity.
Show answerHide answer
Correct answer: Option 1 —
Both statements are true.
Q251 Mark
Statement 1: Angular momentum is the rotational analogue of linear momentum.
Statement 2: In the absence of external torque angular momentum is conserved.
Show answerHide answer
Correct answer: Option 1 —
Both statements are true.
Q261 Mark
Statement 1: For pure rolling v = Rω.
Statement 2: Pure rolling occurs when the contact point is momentarily at rest with respect to the surface.
Show answerHide answer
Correct answer: Option 1 —
Both statements are true.
Case Study / Passage Questions3 questions
Q273 Marks
Two particles of masses 2 kg and 3 kg are placed at positions (1 m 0) and (4 m 0) respectively. The student wants to find the position of the centre of mass and compute the total momentum if the 2 kg particle moves at 5 m/s in +x direction and 3 kg at 2 m/s in −x direction.
The x-coordinate of the centre of mass equals:
A2 m
B2.5 m
C2.8 m
D3 m
The total momentum of the system (in +x direction) equals:
A4 kg·m/s
B8 kg·m/s
C12 kg·m/s
D16 kg·m/s
Compute the velocity of the centre of mass.
Show answersHide answers
1. Option 3 — 2.8 m
2. Option 1 — 4 kg·m/s
3. x_COM = (Σm_ix_i)/(Σm_i) = (2×1 + 3×4)/(2 + 3) = (2 + 12)/5 = 14/5 = 2.8 m. Total momentum p_total = 2(5) + 3(−2) = 10 − 6 = 4 kg·m/s in +x direction. Velocity of COM v_COM = p_total/M_total = 4/5 = 0.8 m/s in +x. Useful: in absence of external force the COM moves with constant velocity.
Q283 Marks
A figure skater with arms outstretched has moment of inertia 6 kg·m² and rotates at 1 rad/s. She pulls in her arms reducing her moment of inertia to 2 kg·m². The coach wants to find her new angular velocity the change in her rotational kinetic energy and explain where the extra energy comes from.
Her new angular velocity equals:
A1 rad/s
B2 rad/s
C3 rad/s
D6 rad/s
Her rotational kinetic energy:
ATripled
BSame
CHalved
DDoubled
Why does her kinetic energy increase when angular momentum is conserved?
Show answersHide answers
1. Option 3 — 3 rad/s
2. Option 1 — Tripled
3. By conservation of angular momentum (no external torque): I₁ω₁ = I₂ω₂ ⇒ 6(1) = 2(ω₂) ⇒ ω₂ = 3 rad/s. KE₁ = (1/2)(6)(1²) = 3 J. KE₂ = (1/2)(2)(3²) = 9 J. KE tripled. The extra energy (6 J) comes from the work the skater's muscles do pulling her arms in against the centrifugal pseudo-force experienced in her rotating frame.
Q293 Marks
A solid sphere a hollow sphere and a solid cylinder all of the same mass and radius are released from rest at the top of an incline of height h. They roll down without slipping. The student wants to determine the order of arrival at the bottom and the velocity of the solid sphere.
The velocity of the solid sphere at the bottom is:
A√(gh)
B√(2gh)
C√(10gh/7)
D√(6gh/5)
Order of arrival at the bottom (fastest first):
ASolid sphere first
BHollow sphere first
CSolid cylinder first
DAll same
Why does the solid sphere reach the bottom first?
Show answersHide answers
1. Option 3 — √(10gh/7)
2. Option 1 — Solid sphere first
3. For rolling: mgh = (1/2)mv² + (1/2)Iω²; with v = Rω and I = β·MR²: mgh = (1/2)mv²(1 + β). v = √(2gh/(1 + β)). Higher β → slower rolling. Solid sphere (β = 2/5): v = √(10gh/7). Solid cylinder (β = 1/2): v = √(4gh/3). Hollow sphere (β = 2/3): v = √(6gh/5). Solid sphere has lowest β → fastest. Order: solid sphere > solid cylinder > hollow sphere.
Table-Based Questions4 questions
Q303 Marks
Study moments of inertia of common shapes about their COM:
Body
Axis
I (about COM)
Thin ring
through centre perp
MR²
Solid disc
through centre perp
(1/2)MR²
Solid sphere
through centre
(2/5)MR²
Hollow sphere (thin shell)
through centre
(2/3)MR²
Thin rod (length L)
through centre perp
(1/12)ML²
The moment of inertia of a solid sphere about its diameter is:
AMR²
B(1/2)MR²
C(2/5)MR²
D(2/3)MR²
The moment of inertia of a uniform thin rod about its centre perpendicular to its length is:
A(1/3)ML²
B(1/12)ML²
C(1/4)ML²
DML²
Compare a solid disc and a hollow ring of equal mass and radius — which would roll faster down an incline?
Show answersHide answers
1. Option 3 — (2/5)MR²
2. Option 2 — (1/12)ML²
3. Moment of inertia depends on the mass distribution and the chosen axis. Solid bodies have lower I than hollow bodies of same mass and outer radius (mass concentrated near centre). The numeric coefficient (β = I/MR²) determines rotational dynamics: lower β = easier to spin up. Useful for predicting rolling speed flywheel performance and gyroscopic stability.
Q313 Marks
Study the analogy between linear and rotational quantities:
Linear
Rotational
Mass m
Moment of inertia I
Velocity v
Angular velocity ω
Force F
Torque τ
Linear momentum p = mv
Angular momentum L = Iω
F = ma
τ = Iα
KE = (1/2)mv²
KE = (1/2)Iω²
The rotational analogue of mass is:
AMass
BMoment of inertia
CForce
DTorque
The rotational analogue of F = ma is τ =:
AIα
Bmω
CIv
Dm·α
Write the rotational analogue of Newton's second law: F = dp/dt.
Show answersHide answers
1. Option 2 — Moment of inertia
2. Option 1 — Iα
3. Linear and rotational mechanics have direct analogies. Replacing m with I and v with ω (along with the substitution of force-quantities like F → τ p → L) lets us transcribe linear equations to rotational form. This is why the motion of a rolling sphere requires both translational and rotational equations to describe fully — the analogy is structural not just computational.
Q326 Marks
Compute the moment of inertia about the indicated axis for each shape (mass M, radius R or length L as relevant).
Body
Axis
Thin ring
Through centre perpendicular
Solid disc
Through centre perpendicular
Solid sphere
Diameter
Hollow sphere
Diameter
Thin rod (length L)
Through centre perpendicular
Thin rod (length L)
Through one end
Q336 Marks
A solid sphere a hollow sphere and a solid disc each of mass M and radius R roll without slipping down an incline of height h. Compute the velocity at the bottom of the incline for each.
Body
I about axis
β = I/(MR²)
Solid sphere
(2/5)MR²
2/5
Hollow sphere
(2/3)MR²
2/3
Solid disc
(1/2)MR²
1/2
Picture-Based Questions1 question
Q343 Marks
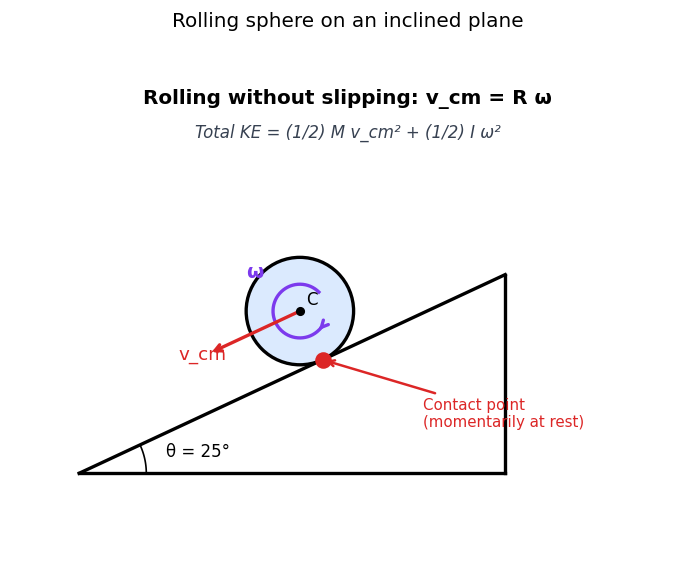
Study the rolling sphere on the inclined plane and answer:
For pure rolling (without slipping), the velocity of the centre of mass and angular velocity are related by:
Av_cm = R ω
Bv_cm = 2R ω
Cv_cm = R ω²
Dv_cm = ω/R
The contact point of the rolling sphere with the incline is:
AMaximum velocity
BMaximum acceleration
CMomentarily at rest
DEqual to v_cm
Explain why the contact point is at rest during rolling and derive v_cm = Rω.
Show answersHide answers
1. Option 1 — v_cm = R ω
2. Option 3 — Momentarily at rest
3. In pure rolling: the contact point is momentarily at rest with respect to the surface. This is because the velocity of any point on the sphere = velocity of centre + velocity due to rotation. At the contact point: v_contact = v_cm + (ω × r) = v_cm + (Rω in the opposite direction) = 0. Hence v_cm = Rω. Total kinetic energy = translational KE + rotational KE = (1/2)Mv² + (1/2)Iω². For a solid sphere I = (2/5)MR², so KE_total = (1/2)Mv²(1 + 2/5) = (7/10)Mv².